Ogólny schemat mikromechanicznego czujnika przyśpieszenia ADXL2xx
Opis czujnika
Budowa wewnętrzna czujnika
Zasada działania
Blok funkcjonalny
Plan ćwiczenia
Czujnik w akcji
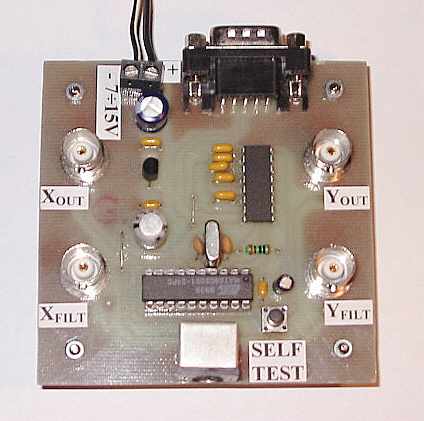
Układ ADXL jest dwuosiowym, mikromechanicznym czujnikiem przyspieszenia. Służy
do pomiaru zarówno dynamicznych jak i statycznych przyspieszeń. Układ posiada
wyjścia analogowe (XFILT, YFILT) oraz wyjścia cyfrowe
(XOUT, YOUT) sygnałów z obu osi. Uzyskany na wyjściach
cyfrowych sygnał ma stały okres (czas próbkowania) i wypełnienie proporcjonalne
do kąta nachylenia w danej osi.
Pasmo może być ustawiane między 0.01Hz, a 5kHz (5 kHz - tylko wyjście analogowe).
Zakres pomiarowy czujnika ±2g (ADXL 202) ±10g (ADXL 210). Układ
może być podłączony bezpośrednio do licznika mikroprocesora bez udziału przetwornika
A/C.
Ogólny schemat mikromechanicznego czujnika przyśpieszenia ADXL2xx
Sensor zawiera międzypalczasty kondensator różnicowy. W układzie ADXL ma on konfigurację lateralną zrealizowaną w technice mikromechaniki powierzchniowej w polikrzemie.
Widok uproszczony struktury mikromechanicznej czujnika
Centralna ruchoma belka tworząc wraz z nieruchomymi belkami strukturę grzebieniową (46 kondensatorów), jest wychylana z położenia równowagi przez siły bezwładności. Ruchoma belka jest jednocześnie ruchomą okładką w strukturze kondensatora różnicowego, który utworzony jest przez odpowiednie połączenia elektryczne belek struktury grzebieniowej.
Widok rzeczywistej struktury czujnika
Napięcia przyłożone do dolnej i górnej elektrody są przesunięte w fazie o 180 stopni. Napięcie to (o przebiegu prostokątnym) jest generowane w oscylatorze o częstotliwości 1MHz.
Gdy elektroda środkowa jest w położeniu równowagi (obie pojemności równe) sygnał
wyjściowy VOUT = 0.
Wychylenie tej elektrody o x daje napięcie równe (dla v1 = V0sin
![]() ct, v2
= -V0sin
ct, v2
= -V0sin![]() ct)
ct)
d0 - odległość spoczynkowa między elektrodami
Jeżeli x zmienia się harmonicznie z częstotliwością ![]() s,
to sygnał wyjściowy (zmodulowany) można zapisać jako:
s,
to sygnał wyjściowy (zmodulowany) można zapisać jako:
Sygnał ten poddaje się następnie demodulacji i filtracji aby uzyskać wyjściowe
napięcie o częstotliwości ![]() s,
proporcjonalne do przyspieszenia.
s,
proporcjonalne do przyspieszenia.
Zmodulowane napięcie wyjściowe z centralnej elektrody sensora po przejściu przez
bufor podawane jest na demodulator synchroniczny (demodulator postaci
czteroćwiartkowego układ mnożącego). Zewnętrzny kondensator Cdem (CX,Y) ustala
pasmo przenoszenia demodulatora (dalej opisany filtr dolnoprzepustowy).
Sygnał z demodulatora jest podawany na przedwzmacniacz pomiarowy, na
wyjściu którego uzyskuje się sygnał VPR. Sygnał ten podawany jest jako sprzężenie
zwrotne na wewnętrzną okładkę kondensatora, przywracając pozycję spoczynkową
elektrody ruchomej i jest jednocześnie miarą badanego przyspieszenia.
Dodatkowy stopień wzmacniacza (nie uwzględniony na rysunku) pozwala dobrać współczynnik
skali i offset napięcia wyjściowego.
Układ "self test" po aktywizacji napięciem zewnętrznym, powoduje przyłożenie
do okładek kondensatora napięcia odchylającego elektrodę ruchomą, co jest równoważne
przyspieszeniu 800mg.
Filtr dolnoprzepustowy tworzą: kondensator CX,Y oraz rezystory kolektorowe
demodulatora Rc = 33kOhm.
Na wyjściu demodulatora pojawia się napięcie o składowych:
- częstotl. sygnału ![]() s;
s;
- częstotl. bocznej 2![]() c-
c-![]() s;
s;
- częstotl. bocznej 2![]() c+
c+![]() s;
s;
Składowe boczne zostają odfiltrowane.
Częstotliwość graniczna wynosi:
Sygnały odfiltrowane podawane są na 14 bitowy modulator DCM (o zmiennym wypełnieniu),
na wyjściu którego uzyskuje się impulsy o określonym czasie powtarzania. Czas
T1 jest zależny od wychylenia czujnika. Dla 0g wypełnienie sygnału
wynosi 50%, i zwiększa się o 12,5% / 1g dla ADXL202 (o 4% / 1g dla ADXL210)
Czas T2, określający szybkość próbkowania ustawiany jest rezystorem RSET
 w
przedziale 0,5 - 10ms
w
przedziale 0,5 - 10ms
Przyspieszenie wyskalowane w g wynosi: A(g)=(T2/T2-0.5)/12.5%
W układzie wykorzystano CX,Y = 1µF, RSET = 1MOhm,
co daje ![]() g
= 5Hz, oraz T2 ok. 6ms
g
= 5Hz, oraz T2 ok. 6ms
w górę
Pełny plan ćwiczenia w formacie doc/zip dostepny jest tutaj.
1. Kalibracja czujnika.
2. Obserwacja działania czujnika jako miernika nachylenia.
3. Obserwacja przebiegów na wyjściach X i Y oraz XFILT, YFILT.
4. SELF TEST.
5. Pomiar charakterystyki UX=f(ax), UY=f(ay). Pomiar charakterystyki dx=f(UX),
dy=f(UY).
6. Obserwacja wpływu uśredniania na dokładność pomiaru.
7. Obserwacja zmian długości T2.
Uruchomić program accel.exe. Nastąpi automatyczna detekcja portu (w razie
braku sygnału użytkownik sam może wybrać port). Po wyborze portu jeśli czujnik
nie jest jednak włączony na monitorze pojawi się ekran oczekiwania na transmisję
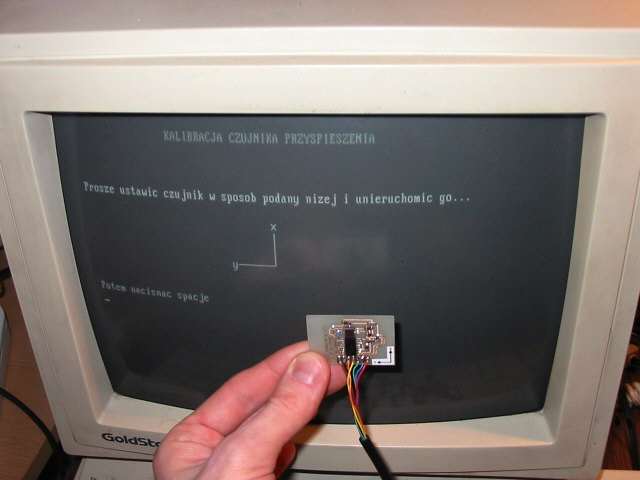
z czujnika. Po włączeniu czujnika powinien pokazać się ekran z procedurą kalibracji.
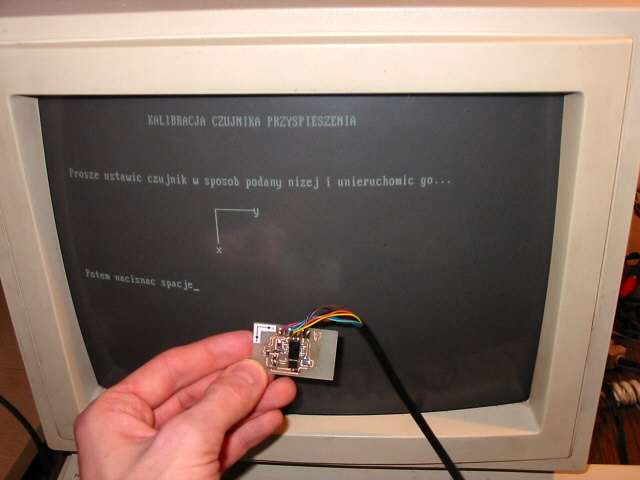
Podczas kalibracji czujnik należy trzymać w taki sposób, aby jego aktualnie
kalibrowana oś była jak najbardziej równoległa do pionu (pozwala to najdokładniej
zmierzyć sygnał przy pobudzeniu czujnika statycznym przyspieszeniem ziemskim,
które pełni tu rolę wzorca). Dla dwukrotnego zwiększenia czułości w stosunku
do wykonania jednego pomiaru wykonuje się dwa pomiary mierząc +1g i -1g.
Dla wyeliminowania błędów od szumów własnych czujnika dla każdego z 4 ustawień
dokonywane jest uśrednienie 60 pomiarów.
Po skalibrowaniu czujnika, należy odpisać dla kanałów X i Y czułość oraz współczynnik
wypełnienia impulsu dla 0g
Po wciśnięciu SPACJI można obserwować graficznie aktualnie mierzone nachylenie płaszczyzny czujnika.
Podłączyć wyjścia XOUT, YOUT do oscyloskopu, wyjścia XFILT, YFILT do woltomierza. Zaobserwować jak zmieniają się przebiegi i napięcia wraz z pochylaniem czujnika. Odpisać czasy i napięcia dla +1g, 0g, -1g.
Układ czujnika posiada wejście SELF TEST, które można sterować z urządzenia
nadrzędnego, w naszym przypadku wejście to uaktywniane jest przyciskiem na płytce
interfejsu.
Po wciśnięciu przycisku SELF TEST odpisać zmiany napięć i wypełnienia przebiegów.
Zmianę wartości wypełnienia przeliczoną na zmianę "g" należy umieścić w sprawozdaniu.
Zmierzyć zależność wypełnienia impulsów od napięcia dla kanałów X i
( dx=f(UXfilt), dy=f(UYfilt) ). Jeśli jest to możliwe, zmierz także kąt nachylenia
czujnika. Charakterystyki umieścić w sprawozdaniu.
Zaobserwować wpływ uśredniania na zmiany wyników pomiaru (zmieniając liczbę
uśrednianych pomiarów).
Jak zmienia się zmierzone przyspieszenie (przy nieruchomym czujniku) dla uśredniania
4 oraz 16 próbek?
Odpisać czas T2 (większa cyfra przy współczynniku wypełnienia). Czas ten powinien
pozostawać stały.
Zaobserwować zmiany czasu T2 podczas:
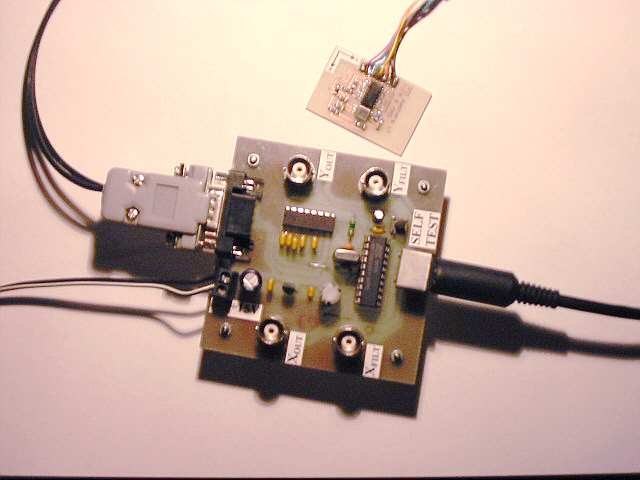
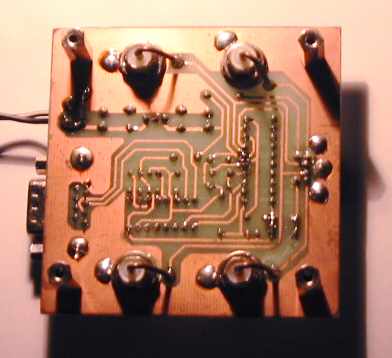
Płytki drukowane - widok całościowy.
Widoczny kabel zasilający, kabel łączący poprzez interfejs RS232 z komputerem PC (po lewej) oraz kabel z wtykiem PS/2 łączący z czujnikiem (po prawej), płytka czujnika widoczna u góry zdjęcia.